안녕하세요. 메카럽입니다.
주말이 끝나고 월요일이 시작되었습니다. 이번 주는 대명절인 추석이 있는 주인만큼 한 주가 부담스럽지 않으실거라 생각합니다. 코로나19로 인해 고향 방문도 못하는 상황이 되어버려 아쉽겠지만 빨리 이겨내서 고향에 계신 부모님을 뵐 수 있는 날이 오길 간절히 기원합니다. 이번 포스팅에서는 아두이노 모터의 드라이버에 대해 알아보고자 합니다.
모터 드라이버는 그 명칭에서 알 수 있듯이 고용량 DC 모터를 원활히 운전시키기 위한 부가장치입니다. 특히 아두이노와 같은 마이크로컨트롤러로 제어하기 쉽게 구성되어 있어 회로를 구성하는 수고를 덜어줍니다. 모터 드라이버는 아두이노로부터 HIGH 또는 LOW 신호를 인가받아 DC 모터의 회전 방향을 결정하고, PWM 신호를 수신하여 모터의 회전력을 제어합니다. 모터의 회전 방향은 모터 드라이버의 극성을 바꾸어 제어하고, 회전력은 PWM 신호로 모터에 유입되는 전력으로 제어합니다.

위 그림은 모터 드라이버가 적용된 회로의 블록 다이어그램을 나타내었습니다. 배터리 전원은 레귤레이터와 모터 드라이버의 전원 입력부러 인가됩니다. 레귤레이터는 아두이노를 작동시키기 위한 전압으로 낮추어주며, 모터 드라이버는 아두이노로부터 신호를 받아 DC 모터를 제어합니다.
즉, 모터 드라이버는 아두이노로부터 크게 두 갖 신호를 인가받습니다. 첫 번째는 정방향으로 회전할지 역방향으로 회전할지를 디지털 신호로 인가받고, 두 번째는 아날로그 단자의 PWM 신호를 통해 모터의 회전력을 인가받습니다.
모터 드라이버는 그럼 어떻게 구성되어 있을까요? 보통 모터 드라이버는 여섯 개 이상의 트랜지스터로 구성된 H-bridge 회로로 구성되어 있습니다.

위 그림은 통상적인 H-bridge 회로 모델을 나타내고 있습니다. 네 개의 스위치로(트랜지스터) H자 형상의 회로를 구성했기에 그런 이름이 붙었습니다. 모터 드리이버에는 이런 회로가 들어가 있어 아두이노를 사용해 손쉽게 DC 모터의 방향 전환과 속도 제어가 가능합니다.
H-bridge 회로는 두 개의 BJT와 네 개의 FET(N-채널 FET 2개, P-채널 FET 2개)로 구성되는데, 그림과 함께 살펴보면 A단자에 HIGH 신호가 인가되면, 1번과 4번 스위치(FET)가 턴 온 되어 모터의 A 극에 +입력이, B 극에 -입력이 인가됩니다.
만약 A 단자가 LOW 상태가 되면, 2번과 4번 스위치가 턴 온 되고 1번, 3번은 턴 오프 되며 모터의 A극에 -입력, B 극에 +입력이 인가됩니다. 즉 아두이노의 HIGH/LOW 출력을 제어하여 모터의 극성을 제엏는 것이 H-bridge 회로입니다.
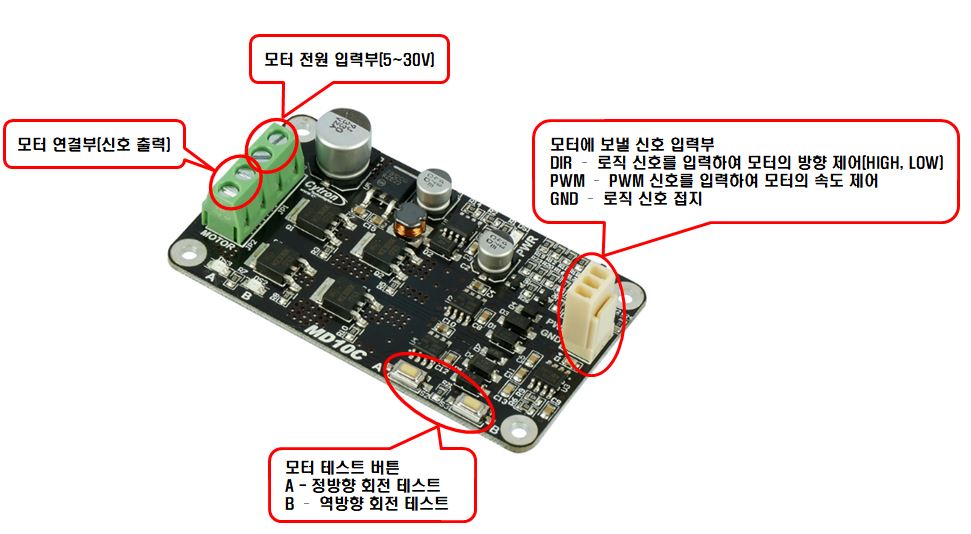
이제 실제 모터 드라이버 예시를 살펴보겠습니다. 위 그림은 Cytron사의 MD10C라는 모터 드라이버이며, 제조사나 모델이 달라도 모터 드라이버의 구성은 거의 유사합니다. 이 모델은 5V에서 30V 사이의 외부전원을 DC 모터로 전달할 수 있으며 허용전류는 10A 수준입니다. 모터 드라이버 내부에는 H-bridge 회로가 들어가 있어 아두이노의 제어 신호를 모터로 전달합니다.
모터 드라이버의 왼쪽 전원부는 POWER와 MOTOR 두 가지 단자가, 오른쪽 신호부는 DIR, PWM, GND 세가지로 구성되어 있습니다.
| 단자 | 역할 | 비고 | |
| 신호부 | DIR | 모터 방향 제어용 단자 | 디지털 포트와 연결 |
| PWM | 모터 회전력 제어용 단자 | PWM 포트와 연결 | |
| GND | 접지 | ||
| 전원부 | POWER | 배터리 전원 단자 | |
| MOTOR | DC 모터 전원 단자 |
DIR은 방향(DIRection)의 약자로 모터의 방향 제어용 단자입니다. 아두이노의 디지털 포트와 연결하고 HIGH 또는 LOW 신호로 제어합니다. PWM 단자는 아두이노의 PWM 단자를 통해 analogWrite( ) 함수로 제어되며, 이 신호를 통해 고용량 베터리 전원을 모터에 전달됩니다. 이러한 구성은 이 모델뿐만 아니라 통상적인 모터 드라이버가 택하고 있는 방식입니다. 단지 DIR이나 PWM이란 글자의 형식이 조금씩 다를 뿐입니다.
모터 드라이버에 대해 알아보았습니다. 다음 포스팅에서는 "analogWrite( )함수와 PWM제어"에 대해 알아보도록 하겠습니다. 오늘 하루도 힘차게 즐겁게 보내시기 바랍니다.
'3D프린터와 아두이노 > 아두이노' 카테고리의 다른 글
| 아두이노 서보모터에 대해서 (4) | 2020.10.05 |
|---|---|
| analogWrite( ) 함수와 PWM제어 (4) | 2020.09.29 |
| DC모터와 트랜지스터 (2) | 2020.09.25 |
| 자기적 스위치와 기계적 스위치 (4) | 2020.09.23 |
| 아두이노 NPN 트랜지스터를 전기적 스위치로 활용 (2) | 2020.09.22 |